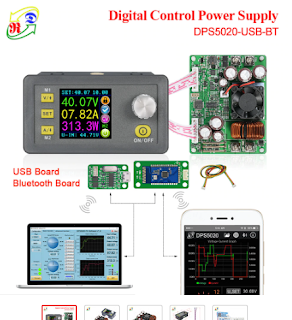
http://s.click.aliexpress.com/e/NZd9uPwC Courant Constant De Tension Constante Module d'alimentation Programmable Modèle de produit: DPS5020 Faites attention avant d'acheter: 1. DPS5020 communication version Android APP a été publié, vous pouvez utiliser bluetooth pour connecter téléphone android, il est seulement suupport Android 5.0 et plus. (Un système android de téléphone de marque appartient à un système personnalisé, notre application ne sera pas compatible, par exemple xiao mi, Nokia et une autre marque, donc veuillez télécharger et tester avant d'acheter, prudent d'acheter) Vous pouvez charger l'application sur DPS5020 Fichier: Http://www.mediafire.com/folder/xmaf7xw1coetq/DPS5020_file Ou recherche Série DPS (H) Sur Google play . 2. Il existe 3 versions, Aucune version de communication, communication + version USB, communication + USB + BT (bluetooth) . 3. Sans communication version , Il n'y a pas de programme de communicatio